The walking skeleton walks: one thin lap of the REMIT spine
At a glance — one stamped kernel call now fans out three genuinely different routes — fast, tracked, covered — and the whole lifecycle runs end-to-end in the browser: capture → world → plan → compare → views → execute → learn, with replay from the stamp reproducing the identical decision.
The problem
REMIT’s register had decided what to build in unusual depth — fifty-eight decisions covering the requirement-first ontology, the seam, stamps, bands, honesty rules — but none of it had ever run. The riskiest thing in a decision-heavy project is finding out late that the decided pieces don’t actually join up. DEC-43/44 prescribe the antidote: a walking skeleton — every stage of the lifecycle spine present and trivially populated, working end-to-end, before any stage gets deep.
Options
- Thicken one stage first (e.g. a real planner, then the rest) — rejected by DEC-43: integration risk surfaces last, exactly where it hurts.
- Mock everything including the paths — rejected by DEC-44’s own wording: a trivial real path keeps the map legible without faking planner quality (NF9).
- One thin lap with per-stage stubs and the substrate threaded in per step — chosen (DEC-44, choice B): content-addressed store, stamp, seam endpoints and data shapes each arrive at the step that first needs them.
A repo-local choice rode along: the deploy pipeline here publishes app/ with no
build step, so the skeleton ships as plain ES modules (JSDoc-typed) rather than
DEC-41’s TypeScript — recorded as a deviation to reconcile at the skeleton gate
(ADR-0005, DEC-47).
The strategy
Walk the system’s own use-order, committing real artifacts at every step:
- Capture — scripted interrogation of one
visitactivity; defaults visibly stamped; the canonical echo-back is the committing act (DEC-17). The requirement becomes a content-addressed, immutable object (DEC-35). - World — a hand-authored 28×18 synthetic AO (roads, wood, marsh, the river
Kara) with one
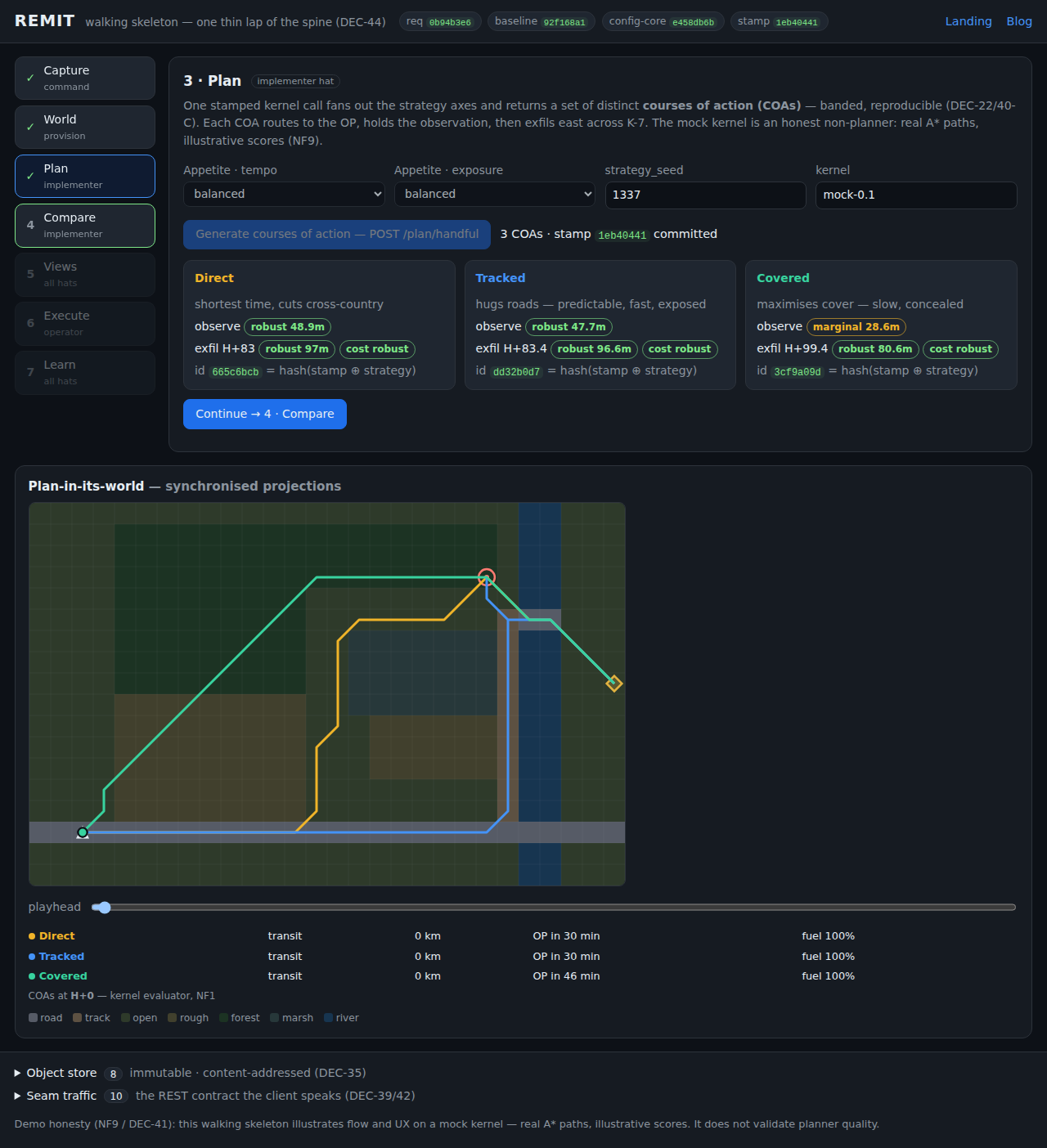
mobilitychannel; the world-defining config core canonicalises and hashes into the stamp (DEC-48). - Plan — the mock kernel: deterministic A* under three strategy biases (time / roads / cover — DEC-22’s fan-out), real paths, banded scores, and a stamp as plan identity (DEC-29).
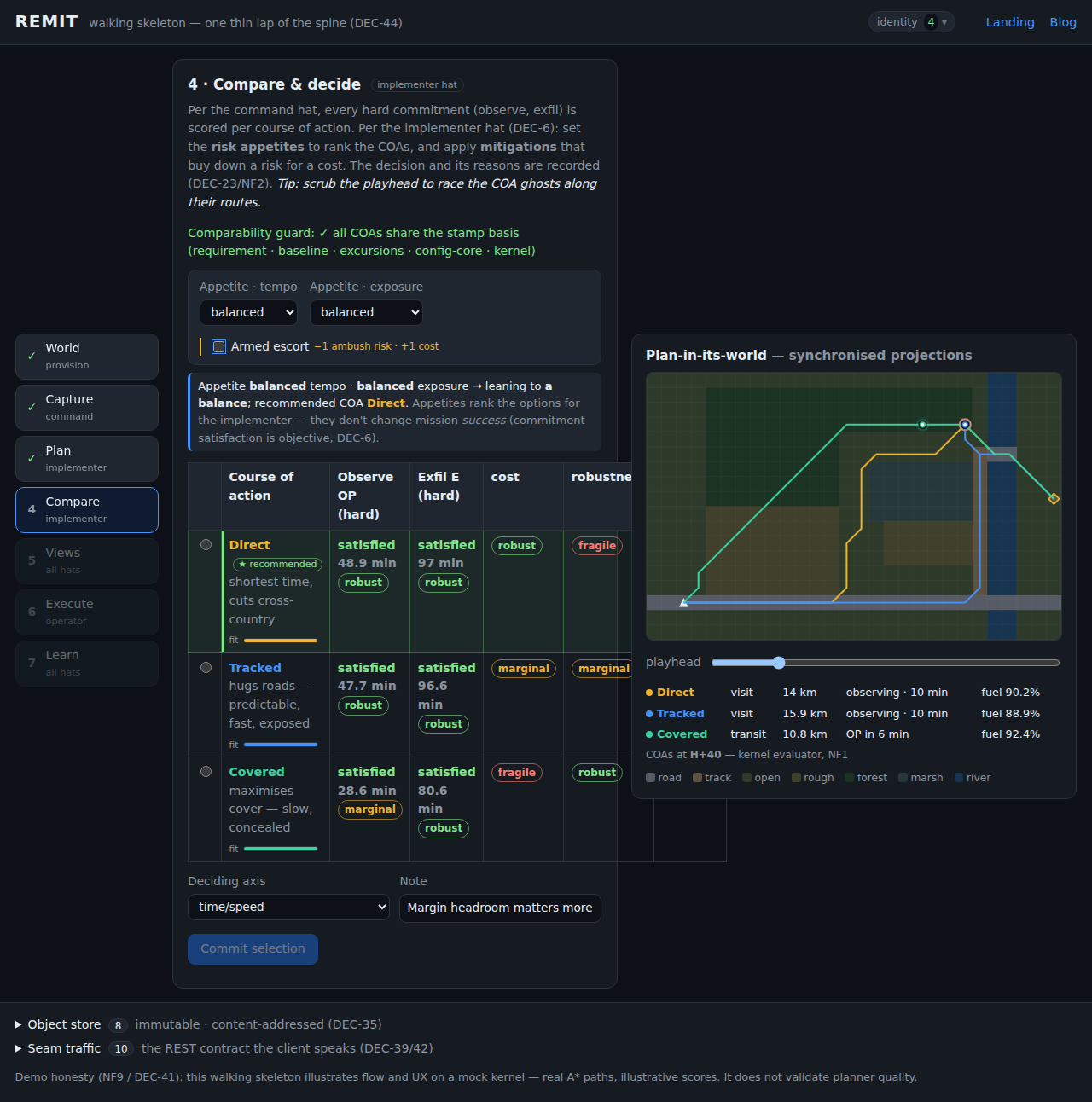
- Compare — the A2 matrix, the comparability guard, and a selection rationale recording chosen + beaten + deciding axis (DEC-23, NF2).
- Views — map + timeline as synchronised projections with a shared playhead, rendered through the kernel’s own evaluator: shown = optimised (NF1).
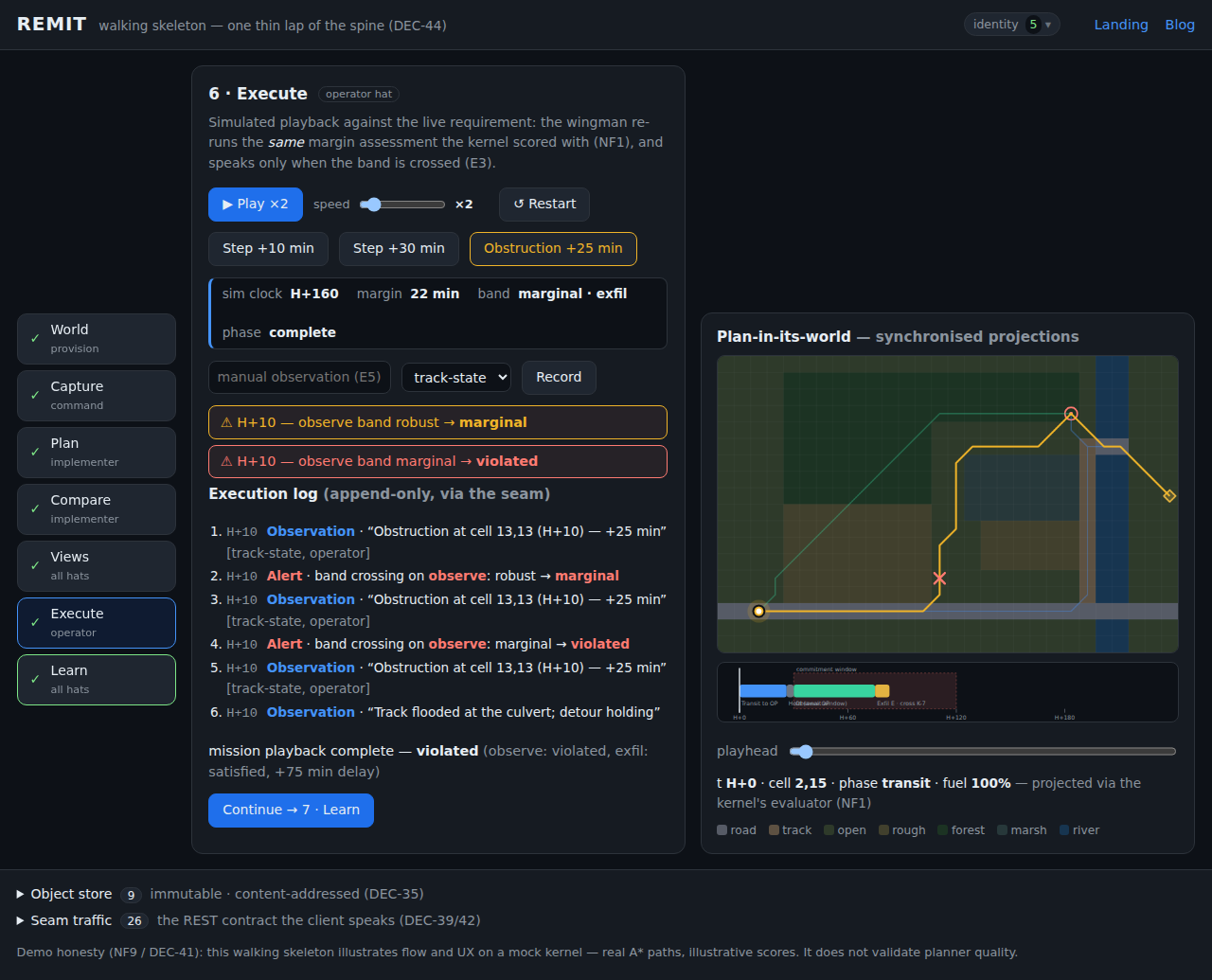
- Execute — simulated playback re-anchoring the same evaluator; one margin band; an alert iff the band is crossed (E3); manual observations append to the log (E5).
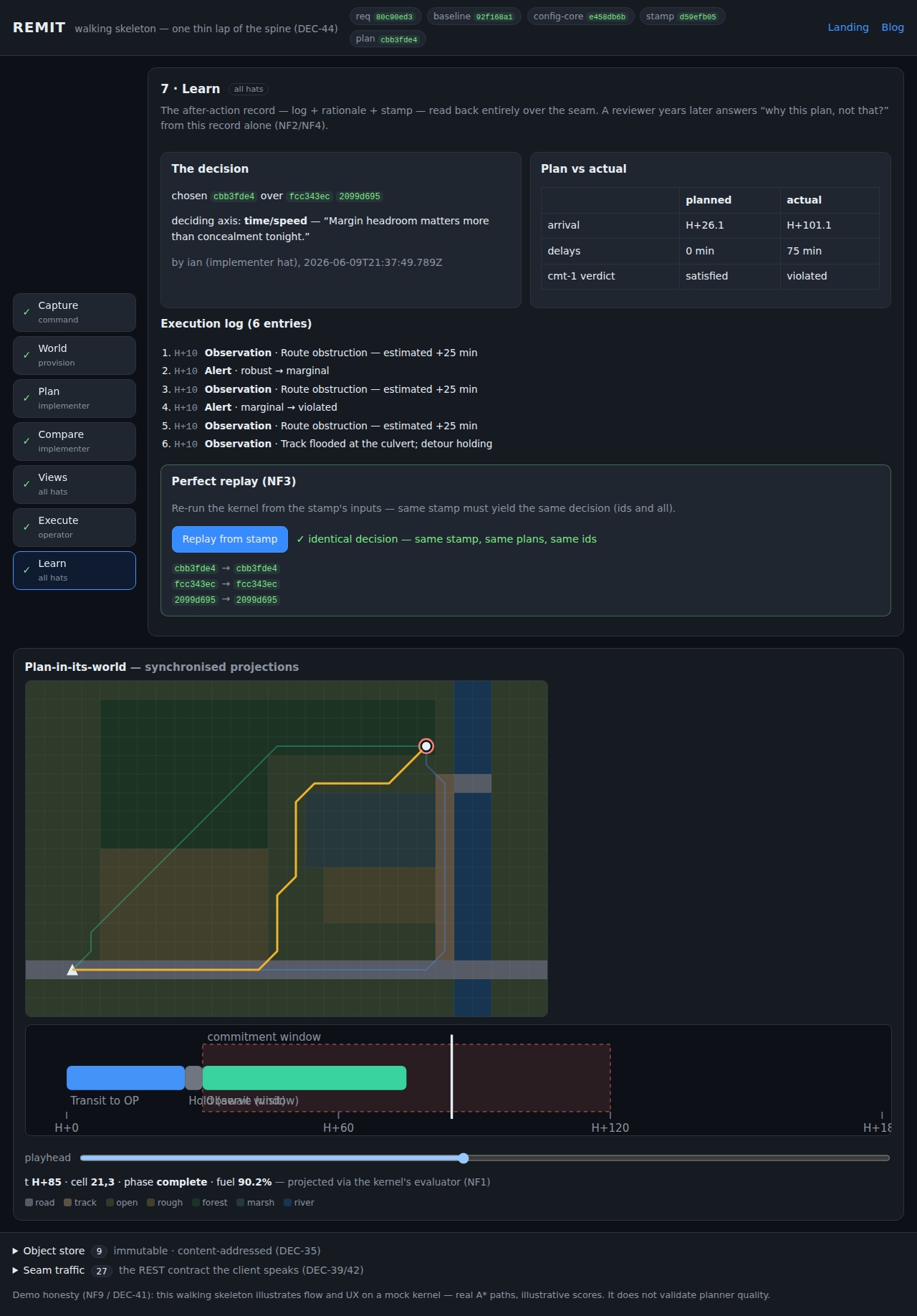
- Learn — the after-action record read back entirely over the seam, and replay from the stamp reproducing the identical plan ids (NF3).
Everything heavy sits behind in-browser mock seam routes (PUT /objects,
POST /plan/handful, /logs/… — DEC-39/41/42), and the app’s footer drawers show
the object store and seam traffic live, so the substrate is visible, not asserted.
The results
- The lap runs end-to-end in the browser with zero build step — and the demo is honest: illustrative scores are labelled, robustness bands say “canned”, and the footer carries the NF9 disclaimer.
- The three strategies produce three distinct routes on the same stamped inputs, with margins banded by a unit derived from channel confidence (NF10).
- Injecting obstructions during playback walks the margin band down — robust → marginal → violated — firing exactly one alert per crossing, all in the append-only log.
- Replay works: re-running the kernel from the stamp yields the same plan ids, asserted in CI (Playwright) and clickable in the Learn stage.
- Two register feedback items surfaced exactly as a skeleton should surface them:
the data-model Stamp needs a profile/start-state axis, and
Plan.id = hash(Stamp)needs a within-handful discriminator (we usedhash(stamp ⊕ strategy)). Both are held for the gate per DEC-47. - The world got its first time-varying condition: K-7 became a tidal ford (wadeable ±3 h of low tide, a parametric periodic channel whose open/close edges are forecast changepoints). The optimiser now weighs waiting at the bank for low water against detouring via the K-9 bridge, materialises both with the real movement model, and publishes the weighing on each COA card — at the default dwell two COAs hold 11 min at the bank (“WAIT, RV H+95.5 vs H+96.1”), and shortening the dwell flips all three to the detour. The map renders the ford open/closed at the projected time, and the vehicle visibly pauses at the water’s edge in playback.
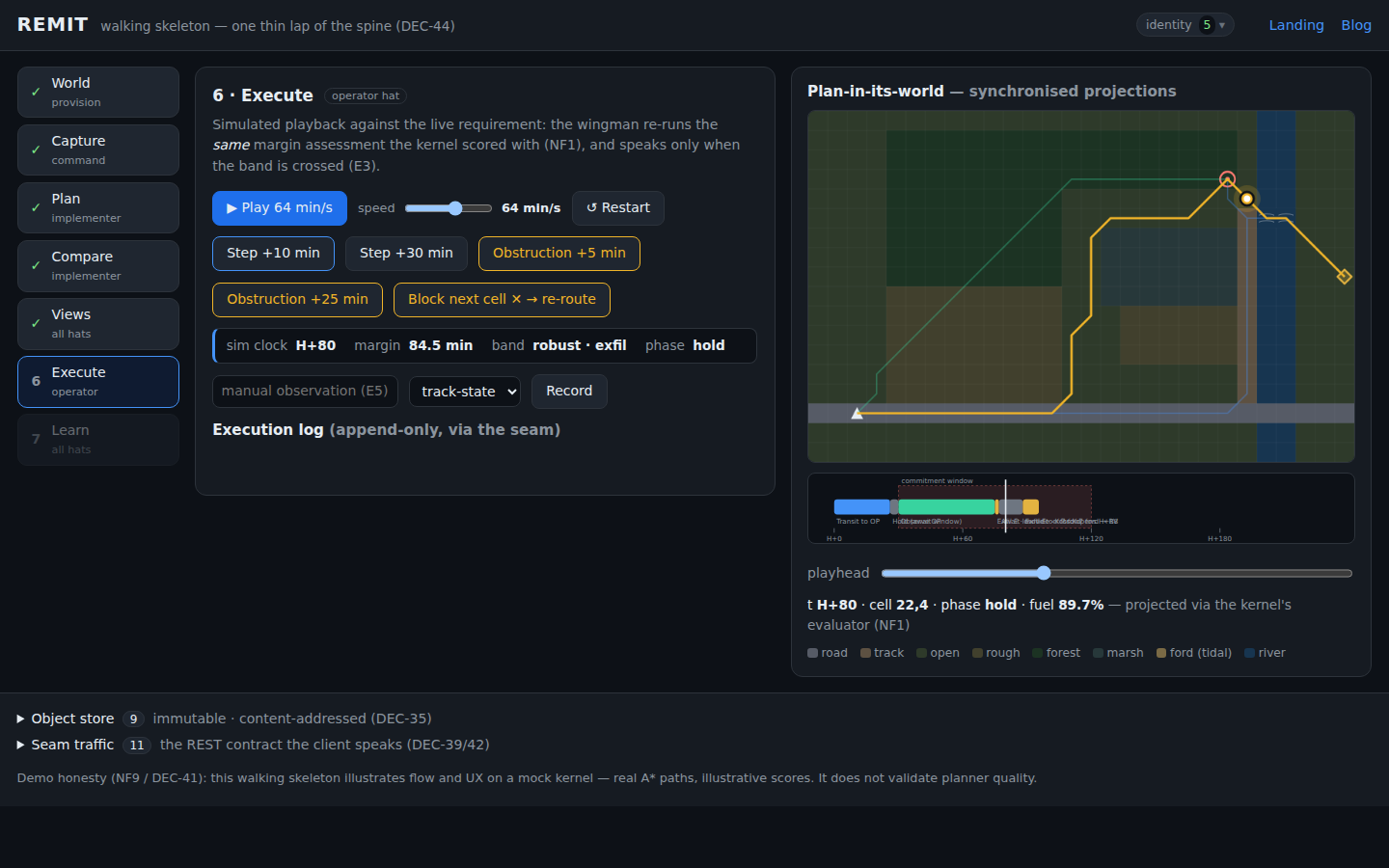
- Execution stays honest about the tide too: an obstruction during playback is a local re-plan — a hold is spliced in where the vehicle stands and the remainder re-timed through the same wait-vs-detour chooser. Small delays are visibly absorbed by the holds (“re-planned, RV unchanged — holds absorbed 5 min”); big ones forfeit the low-tide window, and the wingman flags the re-assessment (≋ wait → open → detour via K-9) as the deadline consequences land in the margin bands.
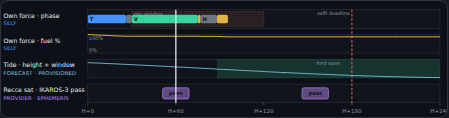
- The timeline grew into a Sync Matrix. The single schedule strip is now a stack of time-aligned tracks — own-force phase + fuel, the tide forecast (height curve + ford-open windows) and a recce satellite’s overhead passes — all under one playhead. It’s the SME’s graph-paper practice made live: each track projects one aspect of an entity (self, forecast, provider — all three provenances), the catalogue is config, and you scan vertically for coincidences. The set-piece: the first satellite pass falls right across the OP dwell — exactly when you’d want overhead imagery.
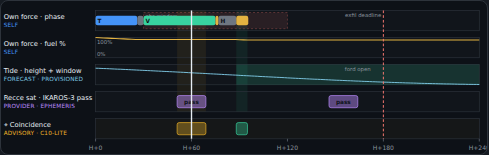
- Then the matrix learned to spot the coincidences for you — advisorily. A coincidence rule is a declared conjunction of aspect-predicates (observing AND satellite-overhead = an “imagery window”; exfil AND ford-open = a “tide-aligned crossing”). Where the predicates all hold, the columns light up and a labelled advisory band appears. It’s strictly advisory — it never changes the plan (the C10-lite discipline) — so the operator keeps the opportunity-spotting seat, with the system pointing rather than deciding.
Screenshots